◆排泄介助
1.排尿予知
超音波で膀胱内の尿量を測定する技術は実用化されていますが、排尿は自身でコントロールしたり、タイミングを調整したりすることが可能です。また、単純なリピートタイマーで代用できる場合も多いため、この技術の有用性は限定的です
2.排便予知
地震予知と似た特徴があり、現在の科学技術では地震の発生場所と時間を正確に予知できないのと同様の課題があります。
排便予知においても、何分後に排便があるかを正確に予測することは困難です。例えば「1時間後に排便がある」と予測された場合、トイレで1時間も待機することは現実的ではなく、実用的な対応が難しい状況です。実用において必要な10分程度の予測精度は、現在の技術では実現できていません。
3.排尿検知
排尿検知は、おむつに電極を張り付け、電極間の抵抗値の変化で排尿を検出する方法があります。ただし、専用の電極付きおむつが必要な上、抵抗値を通信するための装置も必要となる欠点があります。
おむつに使用される吸水ポリマーは水分を吸収しますが、湿気はほとんど吸収できません。そのため、蒸れを防ぐ目的で湿気を外部に放出する構造になっています。この湿気の変化を利用して排尿を検知する方法もありますが、室内の湿度や発汗の影響を受けやすいため、正確に判定するのは難しい場合があります。
これら2つの方法は、排尿の有無は検知できますが、排尿量を測定することはできません。排尿量を正確に計測するには、超音波、ミリ波レーザー、静電容量などの他の技術が必要です。
4.排便検知
お母さんが赤ちゃんの排便に気付くのは、「なんとなく臭い」という直感によることが多いです。このニオイを検知して排便を判定する技術には、20年以上前から多くの技術者が挑戦してきました。しかし、従来のニオイセンサーは感度が低く、実用化には至りませんでした。
近年、MEMS(Micro Electro Mechanical Systems:微小電気機械システム)という技術により、排便を検知できるニオイセンサーが開発され、ニオイを利用した排便検知が可能となりました。
しかし、ニオイセンサーを用いた排便検知には以下のような課題があります。
- ニオイには温度や湿度のような明確な尺度が存在しない。
- 排泄物の性質には個人差がある。
- ニオイセンサーの感度は、動物の嗅覚に比べて大幅に劣る。
- 現場で排泄の状況を直接観察できないため、正確な把握が難しい。
- おむつに直接センサーを取り付ける場合、交換時の手間や装着時の違和感といった問題がある。
- リアルタイム アナログちであるニオイをAI技術で活用するのが難しい。
1996年にフィガロ技研株式会社とフォーリーブス株式会社が特許査定された特許の要約です。
尿や便を吸引パイプで吸引しガスセンサにより検出する。排尿や排便に伴うガスセンサ信号の幅から排尿と排便を検出し、センサ信号のピーク幅が狭いものを排尿とし、センサ信号がブロードなものを排便とする。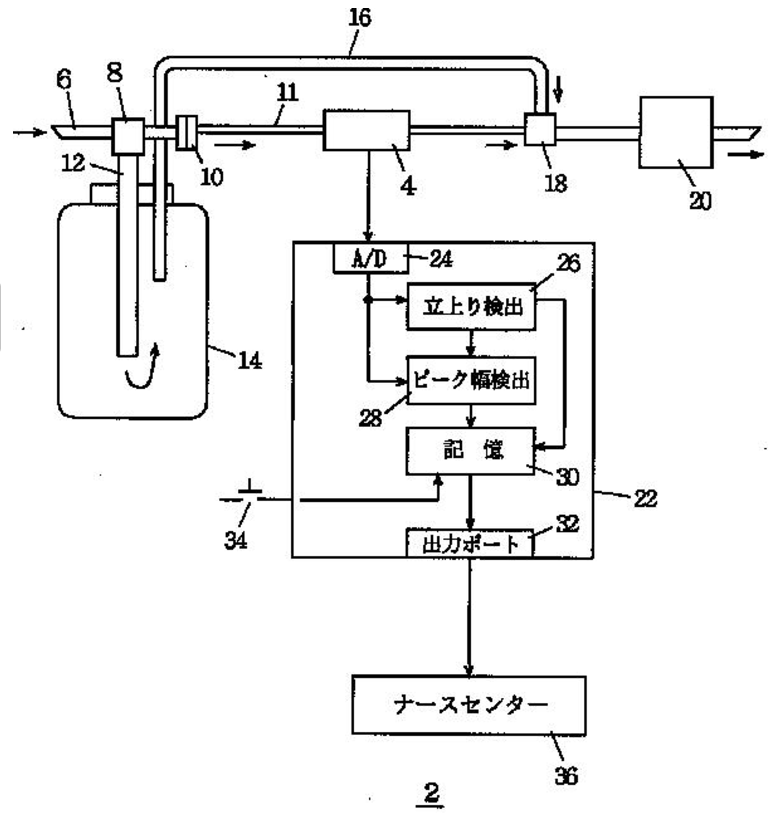
5.おむつモニター
湿度で排尿をニオイで排便を検知するシステムで、上記の困難な課題を克服した排泄センサーです。一目で排尿や排便が分かるようになっています。

◆見守り
1.離床センサー
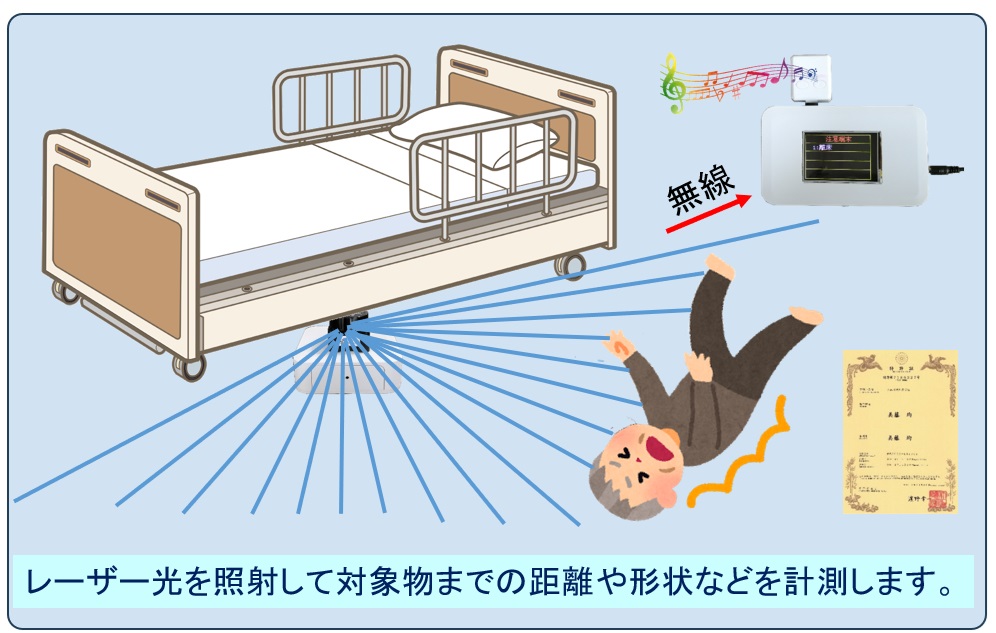
要介護度の高い高齢者がベッドから離れた場合、転倒や徘徊の可能性があるため、高齢者がベッドから離床した時を知らせる装置である。マットスイッチ、人感センサー、光電スイッチなどがあります。
2.転倒センサー
高齢者の転倒を検知するためには大きさを測れるカメラやレーザースキャナなどの2次元センサーが必要となります。
3.徘徊センサー
徘徊には部屋から出てしまう場合と玄関から出てしまう2つの場合があります。簡単なものではドアセンサーや人感センサーがあります。高度なものはカメラを使ったものがあります。
4.オールインワンセンサー
弊社のLiDarを使ったセンサーは上記の離床・転倒・徘徊・介護者の入場を検知できる特許取得の技術です。最大40個のセンサーを1台の専用モニターで管理でき、事象が発生すると瞬時に表示とチャイムで介護者に知らせることができます。