


画面をクリックすると詳細に移動します。
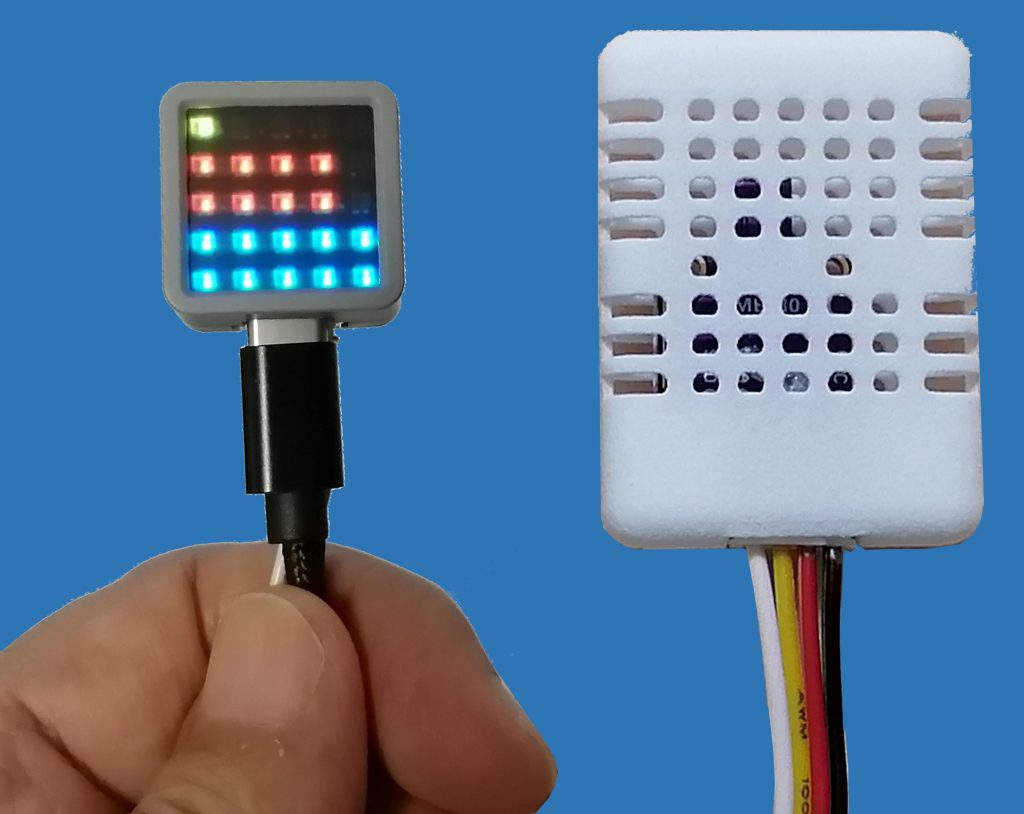
おむつモニターmini
■最小構成のおむつモニターです。
■排泄センサーは(排便センサー、排尿センサー、温度センサー)の3つのセンサーでしっかり排便と排尿と安眠を判定します。
■小さいけれどこのクラスでは世界最高水準のマイコンを搭載しています。
おむつモニターチャイム
おむつモニターにワイヤレスチャイムを追加し、排泄センサーは(排便センサー、排尿センサー、温度センサー)の3つのセンサーで排便を検出し、ナースステーションにチャイム知らせます。

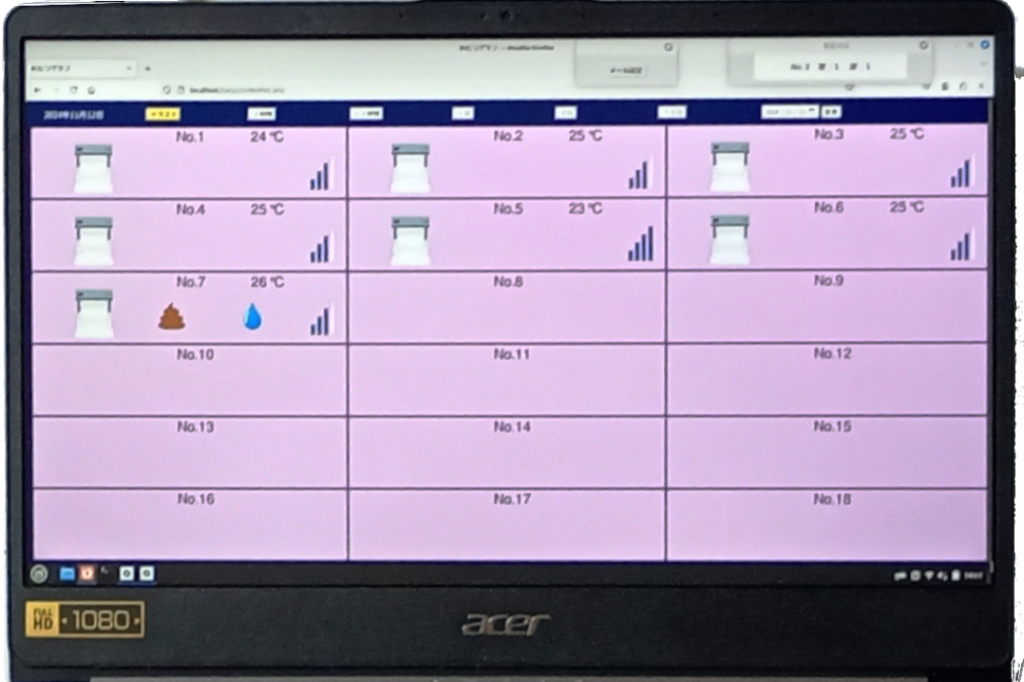
おむつモニター
■サーバー(ノートパソコン)と長距離無線(LORA)と排泄センサーのシンプルな構成ですが、イラストでウンチとオシッコと安眠状況を表示します。
■また多種なグラフで排便や排尿を最大1年間のグラフを表示できます。
■取説なしでも使用でき、設置もユーザー様で行えます。
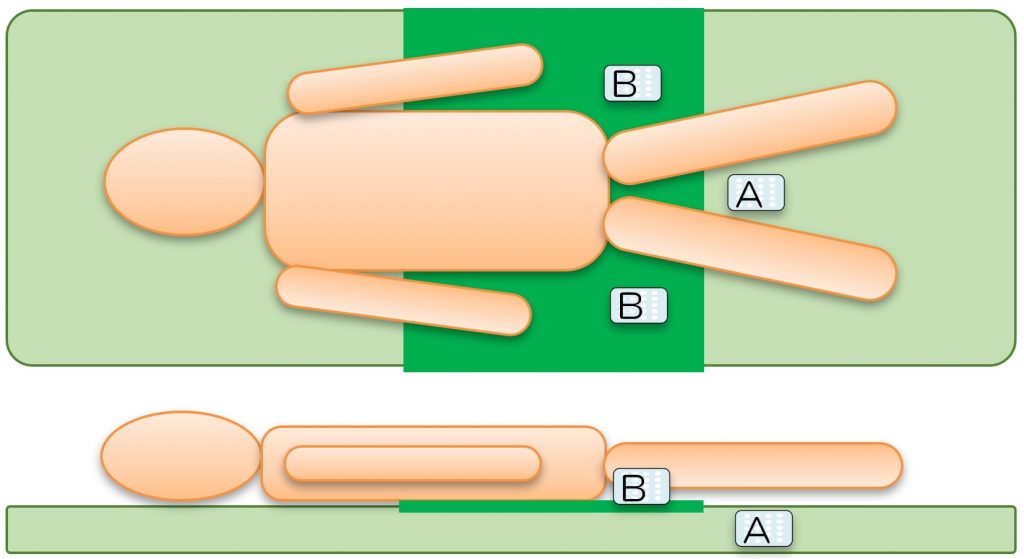
オムツモニターのセンサーの設置
■排泄センサーは基本シーツの下に設置し、毎日の交換などの煩わし作業はありません。
■防水シーツはニオイも通しませんから、避けてシーツの下のA位置に設置してください。
■体位変換枕等でセンサーをA位置に置けない場合は、防水シーツの上のB位置に粘着テープで貼り付けてください。
離床・転倒・徘徊センサー
■ベッドの下にレーザースキャナ置き大きさと距離から、離床・転倒・徘徊を検出します。
■介護士さんや清掃の方には反応しません。

コンクリート床均しロボット
■均し作業に適したモードとアマ出しに適したモードがオンラインで変更できます。
■ジョイステック1個で全ての操縦が出来るため、誰でもその場で操縦ができます。

見守り装置
■田舎の母の動きが毎日2回届きます。
■長年多くの皆様に使用して頂きましたが、ライバル製品が多く出てきたので次期製品の構想を考慮中です。

死活監視装置
■商用電源がなく、太陽パネルで電源を確保している無人観測所に納入しています。
■消費電力が非常に少ない仕様になっています。

絵手紙
叔父の書いた絵手紙の一部を紹介しています。