第3.5世代
作成中です。6月を目途に作成中です。
アマ出しと均しが選択できるように設計しています。
重量は70kg位に成りそうですが、10Kgは軽く作れそうです。
特許も申請中です。ご期待ください。
試験走行にご協力いただける方はご連絡ください。
第3世代
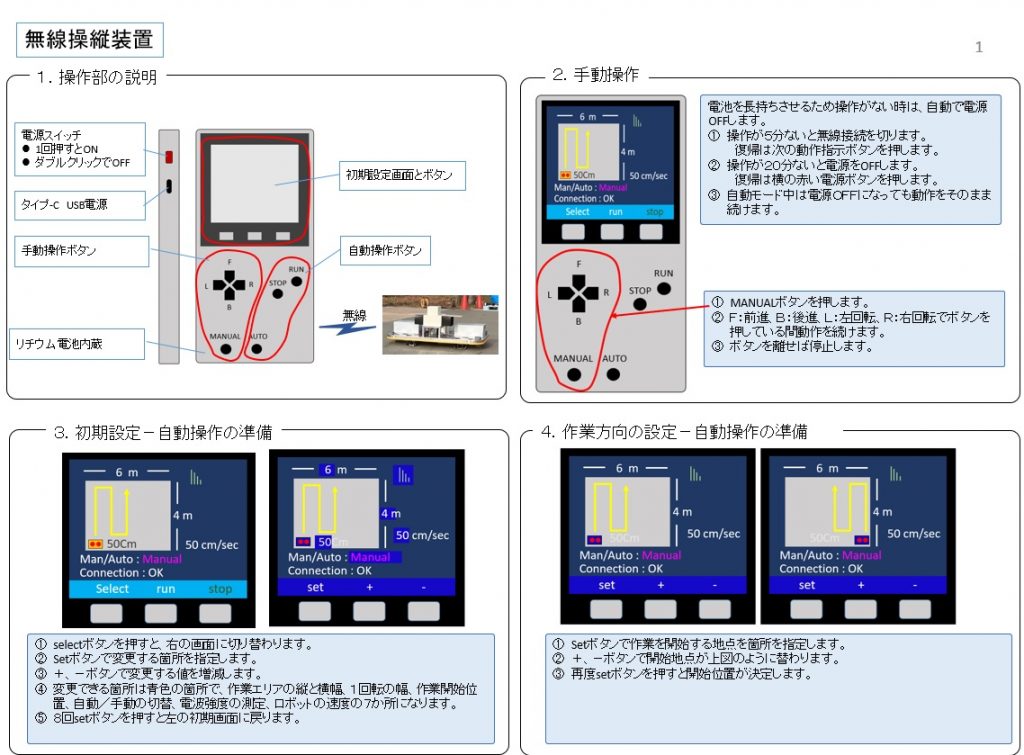
これが3世代のコンクリート床仕上ロボットの操縦装置で、USBケーブルで電源供給します。真ん中の黒いジョイスティックで誰でも説明なしで操縦できるようになっています。

第2世代
レーザー光線で区切られたエリアを櫛の歯上に自動走行します。
操縦器に高機能を詰め込みすぎました。
コンクリート床を走行しましたが、アマ出しは出来ましたが、均しは出来ませんでしたが、走行は安定し、操縦も非常に簡単にできました。
無線はWIFIルータが不要のプロトコルを使用したため距離的には問題がないようです。
清水建設主催のコンクリート施工効率化分科会

第1世代
土間整地ロボットの実験機です。うすのろですがモーターをパワーアップすれば、何とかなるかな?
第0世代(原点)
この小さいロボットに進行方向を決めるコンパスと慣性誘導センサーと障害物検出センサーを積んでいます。
GPS TEST
このバーギはGPSで確定した2か所にタイヤを置き、バギーがGPSポイントに到達したときに停止し、その後他のGPSポイントに向かいます。
精度が2mなのでこんなところでしょうか。