2台のモーター制御で自在に走行。土間仕上げの重労働を遠隔操作で解決
左右に配置したトロウェルの回転を独立したモーターで制御する「デュアルローター方式」を採用しています。左右の回転差を利用することで、ステアリング機構なしで前後左右・旋回といった自由自在な走行を実現しました。打設直後の柔らかいコンクリート床上をスムーズに移動し、熟練工の技術が必要な「アマ出し」や「平滑仕上げ」を高精度かつ均一に実行します。
特徴
複雑な操舵機構を排除し、モーター制御のみで移動するため、圧倒的な「軽量化」と「メンテナンス性の向上」を達成しました。低出力モーターでも効率よく稼働し、バッテリーによる長時間運転が可能です。操作はジョイスティック1本で完結。ゲーム感覚の直感的な操作で、経験の浅い作業員でも即座に熟練工のような動きを再現できます。
導入の効果
|
建設業界で深刻化する「人手不足」と「高齢化」に加え、過酷な「中腰姿勢」による身体的負担は喫緊の課題です。本ロボットの導入により、熟練工に依存していた土間仕上げ作業を省力化・標準化します。過酷な重労働を機械に任せることで、誰もが長く健康に働ける、新しい建設現場のワークスタイルを確立します。 完全電動のため排ガスがなく、換気の難しい屋内現場や地下でも安全に稼働可能。静音性にも優れ、夜間工事やビル内での作業にも適しています。 |
第3.5世代
作成中です。6月を目途に作成中です。
アマ出しと均しが選択できるように設計しています。
重量は70kg位に成りそうですが、10Kgは軽く作れそうです。
特許査定がおりました。ご期待ください。
試験走行にご協力いただける方はご連絡ください。

第3世代
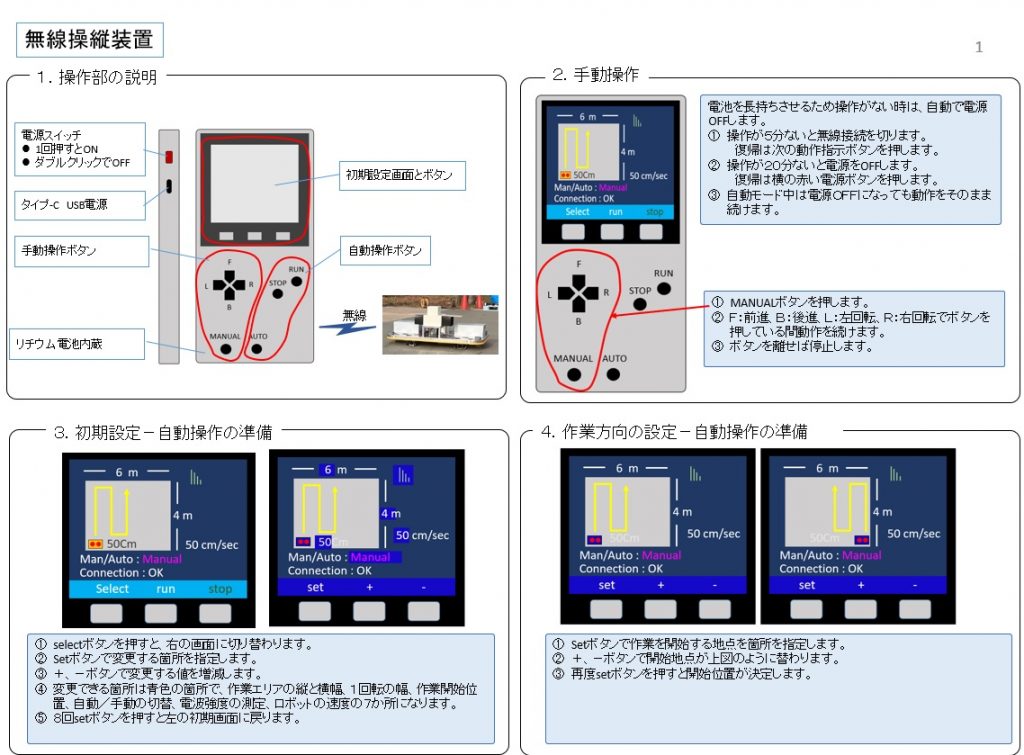
操縦装置
これが3世代のコンクリート床仕上ロボットの操縦装置で、USBケーブルで電源供給します。真ん中の黒いジョイスティックで誰でも説明なしでゲーム感覚で操縦できるようになっています。

第2世代
レーザー光線で区切られたエリアを櫛の歯上に自動走行します。
操縦器に高機能を詰め込みすぎました。
コンクリート床を走行しましたが、アマ出しは出来ましたが、均しは出来ませんでしたが、走行は安定し、操縦も非常に簡単にできました。
無線はWIFIルータが不要のプロトコルを使用したため距離的には問題がないようです。
清水建設主催のコンクリート施工効率化分科会

第1世代
土間整地ロボットの実験機です。うすのろですがモーターをパワーアップすれば、何とかなるかな?
第0世代(原点)
この小さいロボットに進行方向を決めるコンパスと慣性誘導センサーと障害物検出センサーを積んでいます。
GPS TEST
このバーギはGPSで確定した2か所にタイヤを置き、バギーがGPSポイントに到達したときに停止し、その後他のGPSポイントに向かいます。
精度が2mなのでこんなところでしょうか。